Safe Path Planning
Path planning algorithms for safe interaction and deployment.
Robust Control
Actuation resilient and difficult dynamics handling for reliable operations.
Load Transportation
Collaborative and single agent transportation methods for space and subsea.
Efficient Formation Flight
Communication efficient control methods, scalable for large swarms.
Autonomous Assembly
Combined load transportation and planning for large scale assembly.
Modular Robotics
Resilient and augmented autonomous systems via distributed control and modular systems.

Multi-agent robotic systems are the best candidates for the support of future space and underwater missions, due to their inherent resilience to individual agent failures, and application to a wider range of tasks by using heterogeneous elements. Underwater and space environments share a common effect over the systems navigating through them: perceived weightlessness, where bodies can float and, in some conditions, drift indefinitely. Weightless environments pose new control challenges, considering the complexity of safety during execution, as well as redundancy for an increased mission success rate. Automatic control methods designed for safety-critical multi-agent systems in weightless environments are, therefore, a necessity. The multi-agent approach in this project is expected to promote a symbiosis between astronauts/divers and robotic assistants in operations involving formations, collaborative load transportation, as well as safe human-robot interaction. DISCOWER is a step forward towards efficient and resilient exploration missions, yielding a strong impact in the sustainable discovery of both space and underwater systems and beyond.
In view of the experiences within space and subsea environments, this project aims at a bi-directional technology transfer, where agents operating in both environments benefit from one another’s technological breakthroughs. The chosen approach may lead to advancing distributed and safe control methods for multi-agent systems, tailored for safety-critical applications, and filling the research gap on control and planning for weightless environments.
Developed by DISCOWER, this advanced facility simulates spacecraft and robotics in a two-dimensional representation of microgravity, enabling the development and evaluation of autonomous control and planning algorithms for multi-agent systems under microgravity-like conditions.
Visit siteKTH's marine robotics test environment, a unique facility where researchers explore the future of marine robotics technology, from autonomous underwater vehicles collaborating with divers to surface and aerial drones.
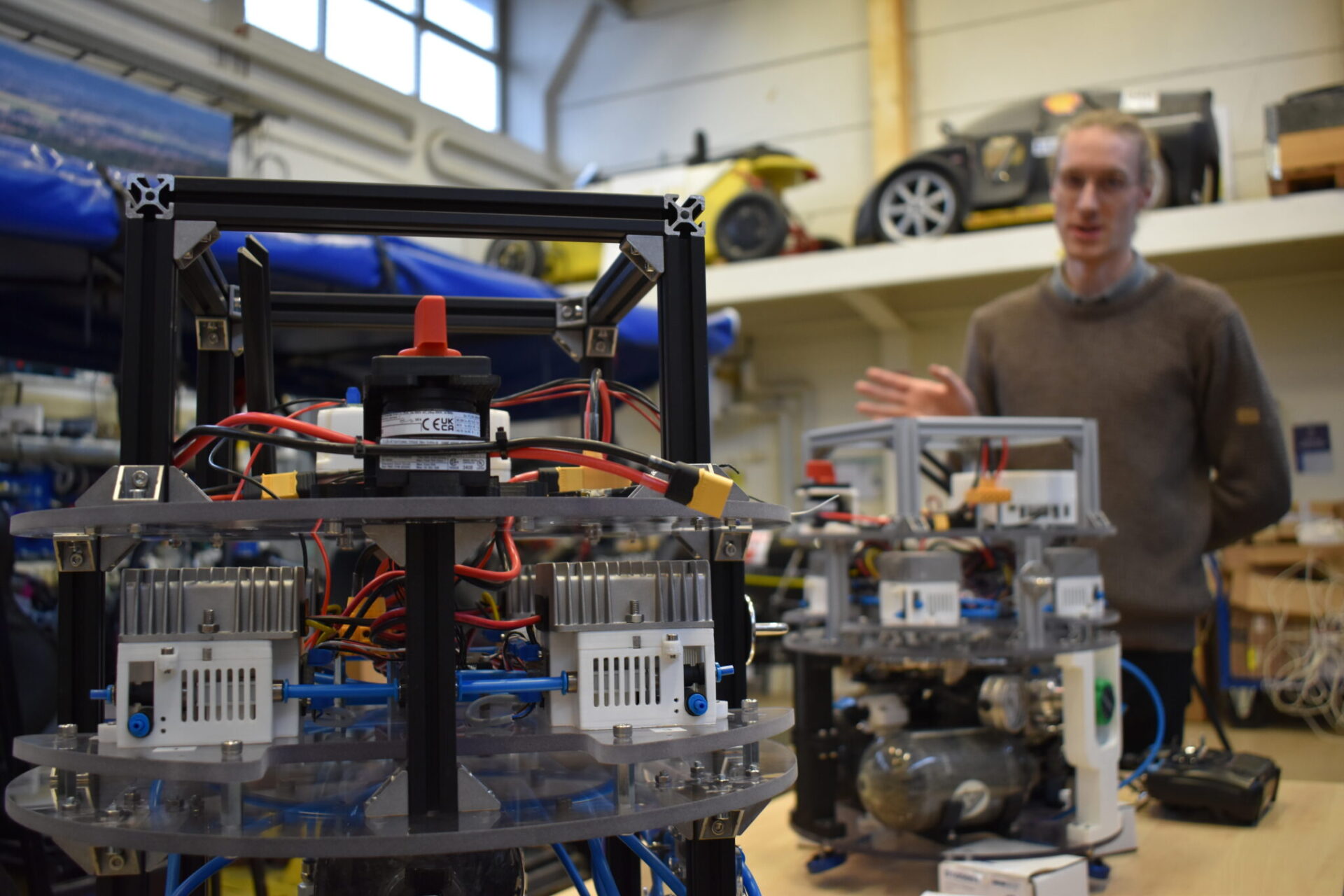
Visit siteA fully open-source free-flyer platform developed by DISCOWER, moving frictionlessly over a flat floor through thruster-like propulsion using compressed air to simulate spacecraft dynamics in two dimensions for testing and validating space systems.
Visit siteNews
Latest news about DISCOWER.

DISCOWER is Highlighted in IVA's annual speech.

Axiom-3 astronauts try our spacecraft simulators!
New lab trains space robots in weightless environments.

DISCOWER's Space Robotics laboratory at KTH ITRL.

A WASP news article on DISCOWER.