News
Latest news about DISCOWER.

IVA Highlight
DISCOWER is Highlighted in IVA's annual speech.

Axiom-3 Visit
Axiom-3 astronauts try our spacecraft simulators!
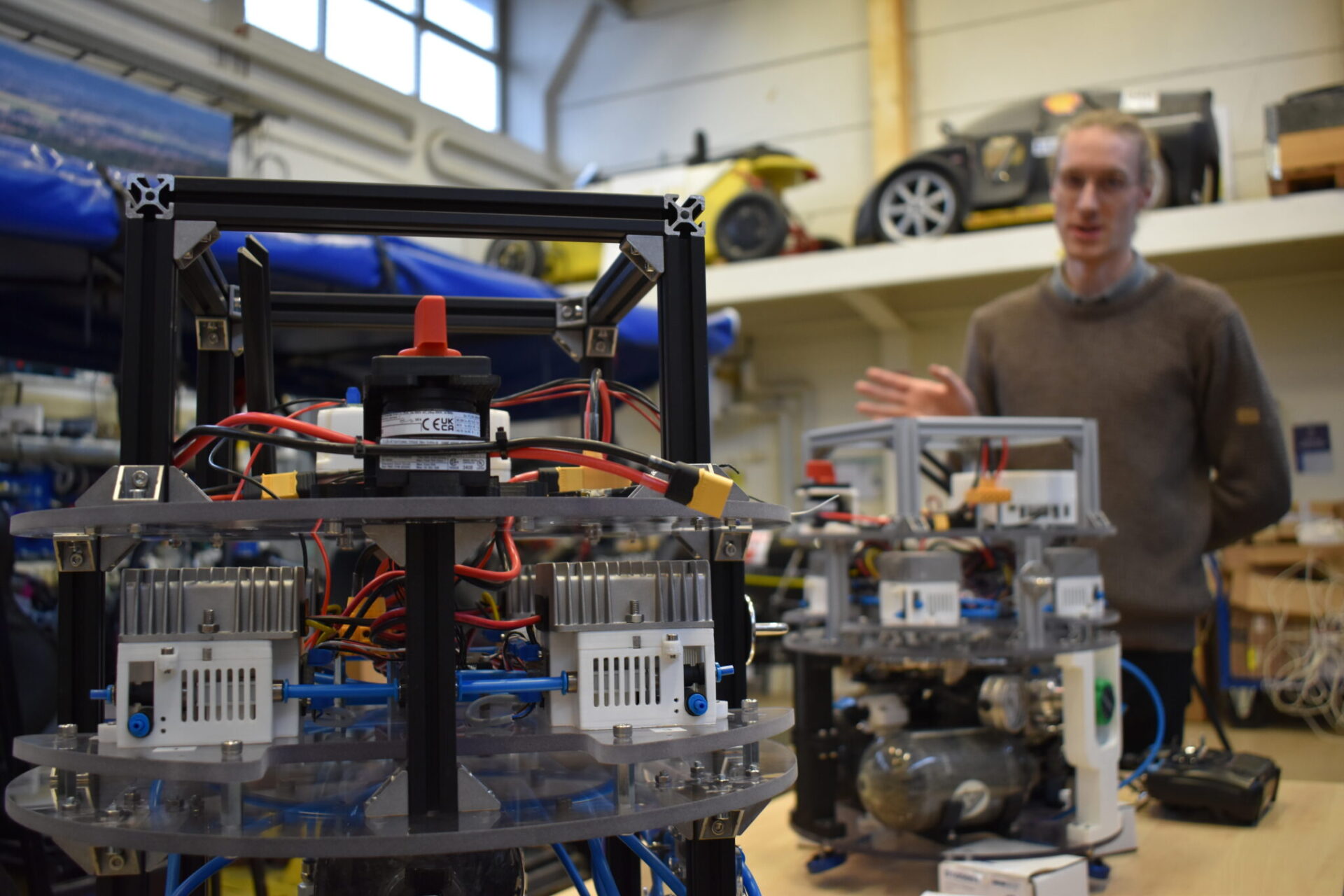
WASP Interview
New lab trains space robots in weightless environments.

Space Robotics Lab at KTH ITRL
DISCOWER's Space Robotics laboratory at KTH ITRL.

United by Weightlessness
A WASP news article on DISCOWER.